Optimització del rendiment amb MPU-6050: configuració, calibració i aplicacions
2024-04-25
9266
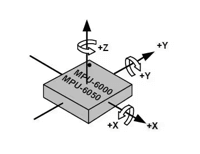
MPU-6050 és el primer component de processament integrat de moviment de 6 eixos del món, que integra un giroscopi de 3 eixos, acceleròmetre de 3 eixos i un processador de moviment digital escalable (DMP).L’objectiu d’utilitzar -lo és obtenir l’angle d’inclinació de l’objecte a mesurar (com ara un quadcopter, un cotxe d’equilibri) als eixos x, y i z, és a dir, l’angle de pas, l’angle de rotlle i l’angle de la boca.Llegim les sis dades del MPU-6050 (valor AD de tres eixos i valor AD de la velocitat angular de tres eixos) a través de la interfície I2C.Després del processament de fusió de postura, es poden calcular els angles de pas, rotlle i boda.Com a referència direccional per als valors de mesurament, la definició de la direcció de coordenades del sensor es mostra a la figura següent, que segueix el principi del sistema de coordenades de mà dreta (és a dir, el polze dret apunta cap a la direcció positiva de la X-Eix, el dit índex apunta a la direcció positiva de l’eix Y i el dit mig apunta a la direcció positiva de l’eix Z).
Catàleg
Amb el seu bus dedicat al sensor I2C, la MPU-6050 és capaç de rebre l’entrada directament d’una brúixola externa de 3 eixos, proporcionant una sortida completa de 9 eixos MotionFusion ™.Elimina el problema de discrepància entre el giroscopi combinat i la línia de temps de l’accelerador i redueix significativament l’espai d’envasament en comparació amb les solucions multi-components.Quan està connectat a un magnetòmetre de tres eixos, la MPU-60x0 és capaç de proporcionar una sortida completa de fusió de moviment de 9 eixos al seu port principal I2C o SPI (tingueu en compte que el port SPI només està disponible a la MPU-6000).
Alternatives i equivalents
- MPU-3300
- MPU-6000
- MPU-6500
Fabricant de MPU-6050
El fabricant de MPU-6050 és TDK.Després que els dos fundadors de TDK, el doctor Yogoro Kato i Takei Taki, van inventar ferrita a Tòquio, van fundar Tokyo Denkikagaku Kogyo K.K.El 1935. Com a marca global de la indústria electrònica, TDK sempre ha mantingut una posició dominant en els camps de matèries primeres electròniques i components electrònics.La cartera de productes integral i basada en la innovació de TDK cobreix components passius com ara condensadors ceràmics, condensadors electrolítics d’alumini, condensadors de cinema, productes magnètics, components d’alta freqüència, dispositius piezoelèctrics i de protecció, així com sensors i sistemes de sensors (com la temperatura i la pressió, la pressió,Sensors magnètics i MEMS), etc. A més, TDK també proporciona fonts d’energia i dispositius d’energia, caps magnètics i altres productes.Les seves marques de productes inclouen TDK, EPCOS, Invensense, Micronas, Tronics i TDK-Lambda.
Diagrama de blocs interns de MPU-6050

Entre ells, SCL i SDA hi ha les interfícies IIC connectades a la MCU i la MCU controla la MPU-6050 mitjançant aquesta interfície IIC.També hi ha una interfície IIC, és a dir, aux_cl i aux_da.Aquesta interfície es pot utilitzar per connectar dispositius esclaus externs, com ara sensors magnètics, per formar un sensor de nou eixos.Vlogic és la tensió del port IO.Aquest PIN pot suportar un mínim d’1,8V.Normalment el connectem directament a VDD.L’AD0 és el passador de control d’adreces de la interfície IIC Slave (connectada a la MCU).Aquest PIN controla el bit més baix de l’adreça IIC.Si està connectat a GND, l'adreça IIC de MPU-6050 és 0x68;Si està connectat a VDD, és 0x69.Tingueu en compte que l’adreça aquí no inclou el bit més baix de transmissió de dades (el bit més baix s’utilitza per representar les operacions de lectura i escriptura).Al MWBalancedStC15, AD0 està connectat a GND, de manera que l’adreça IIC de la MPU-6050 és 0x68 (excloent el bit més baix).
Inicialitzeu la interfície IIC
MPU-6050 utilitza la IIC per comunicar-se amb STC15, de manera que hem de inicialitzar primer les línies de dades SDA i SCL connectades a MPU-6050.
Restableix MPU-6050
Aquest pas restaura tots els registres dins de la MPU-6050 als seus valors predeterminats, que s’aconsegueix escrivint 1 a bit7 del registre de gestió d’energia 1 (0x6b).Després de restablir-se, el Registre de Gestió d’energia 1 es restablirà al valor predeterminat (0x40), i aquest registre s’ha de configurar posteriorment a 0x00 per despertar la MPU-6050 i posar-lo en estat de treball normal.
Configureu l’interval a escala completa del sensor de velocitat angular (Gyro) i del sensor d’acceleració
En aquest pas, establim l’interval a escala completa (FSR) dels dos sensors a través del registre de configuració del giroscopi (0x1b) i el registre de configuració del sensor d’acceleració (0x1c) respectivament.Típicament, establim l’interval a escala completa del giroscopi a ± 2000dps i l’interval a escala completa de l’acceleròmetre a ± 2G.
Configureu altres paràmetres
Aquí, també hem de configurar els paràmetres següents: desactivar les interrupcions, desactivar la interfície Aux I2C, desactivar FIFO, configurar la velocitat de mostreig del giroscopi i configurar el filtre digital de pas baix (DLPF).Com que no utilitzem interrupcions per llegir dades en aquest capítol, cal desactivar la funció d’interrupció.Al mateix temps, com que no utilitzem la interfície Aux I2C per connectar altres sensors externs, també hem de tancar aquesta interfície.Aquestes funcions es poden controlar mitjançant el registre d'activació d'interrupció (0x38) i el registre de control d'usuaris (0x6a).MPU-6050 pot utilitzar FIFO per emmagatzemar dades del sensor, però no l’hem utilitzat en aquest capítol, de manera que s’han de tancar tots els canals FIFO.Es pot controlar a través del Registre Habilita FIFO (0x23).De manera predeterminada, el valor d’aquest registre és 0 (és a dir, FIFO està desactivat), de manera que podem utilitzar directament el valor per defecte.La taxa de mostreig del giroscopi està controlada pel registre de divisors de taxes de mostreig (0x19).Normalment, establim aquesta velocitat de mostreig a 50. La configuració del filtre digital de pas baix (DLPF) es completa a través del registre de configuració (0x1a).En general, establirem DLPF a la meitat de l'amplada de banda per equilibrar la precisió de les dades i la velocitat de resposta.
Configureu la font del rellotge del sistema i activeu el sensor de velocitat angular i el sensor d’acceleració
La configuració de la font del rellotge del sistema depèn del registre de gestió d’energia 1 (0x6b), on els tres bits més baixos d’aquest registre determinen la selecció de la font del rellotge.De manera predeterminada, aquests tres bits s’estableixen en 0, cosa que significa que el sistema utilitza l’oscil·lador intern de 8MHz RC com a font del rellotge.Tanmateix, per millorar la precisió del rellotge, sovint la configurem a 1 i seleccionem el giroscopi de l’eix x PLL com a font del rellotge.A més, permetre el sensor de velocitat angular i el sensor d’acceleració també és un pas important en el procés d’inicialització.Ambdues operacions s’implementen mitjançant el registre de gestió d’energia 2 (0x6c).Simplement configureu el bit corresponent a 0 per activar el sensor corresponent.Després de completar els passos anteriors, la MPU-6050 pot introduir un estat de treball normal.Els registres que no estan especialment establerts adoptaran els valors predeterminats preestablerts pel sistema.
Com funciona la MPU-6050?
Sensor de Gyro
El sensor està equipat amb un giro a l'interior, que sempre es mantindrà paral·lel a la direcció inicial a causa de l'efecte giroscòpic.Per tant, podem calcular la direcció i l’angle de la rotació detectant la desviació del giro des de la direcció inicial.
Sensor de l’acceleròmetre
Un sensor d’acceleròmetre és un dispositiu que pot mesurar l’acceleració i funciona basat en el principi d’efecte piezoelèctric.Durant l’acceleració, el sensor mesura la força inercial aplicada al bloc de massa i després calcula el valor d’acceleració mitjançant la segona llei de Newton.
Processador de moviment digital (DMP)
El DMP és un mòdul de processament de dades del xip MPU6050 que compta amb un algorisme de filtratge de Kalman integrat per adquirir dades dels sensors del giroscopi i l’acceleròmetre i processant els quaternions de sortida.Aquesta característica redueix considerablement la càrrega de treball del microprocessador perifèric i evita el procés de filtratge tediós i de fusió de dades.
Notes:
Quaternions: Quaternions són números de supercomplex.Els números complexos es componen de nombres reals més la unitat imaginària I, on i^2 = -1.
On s’utilitza MPU-6050?
- joguines
- Manges i jocs portàtils
- Controladors de jocs basats en moviment
- Tecnologia Blurfree ™ (per a l'estabilització de vídeo/imatge fixa)
- Tecnologia AirSign ™ (per seguretat/autenticació)
- Reconeixement de gestos instantanis ™ IG ™
- Sensors portables per a la salut, la forma física i els esports
- Framework de jocs i aplicacions habilitats en moviment
- Tecnologia MotionCommand ™ (per a dreceres de gestos)
- Serveis basats en la ubicació, punts d’interès i comptes morts
- Controls remots 3D per a DTV connectats a Internet i configureu les caixes superiors, ratolins 3D
- Tecnologia TouchAnyWhere ™ (per a la navegació/navegació d'aplicacions de la interfície d'usuari "No Touch")
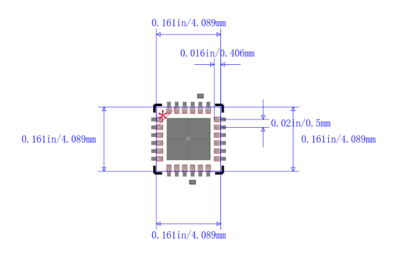
Paquet de MPU-6050
Com reduir el soroll de MPU-6050?
Podem prendre les maneres següents de reduir el soroll de la MPU-6050.
Utilitzeu sensors calibrats
Calibrar l’acceleròmetre i el giroscopi de la MPU-6050 pot eliminar el biaix i l’error dels propis sensors, reduint així l’efecte del soroll.El procés de calibració normalment consta de dues etapes: calibració estàtica i calibració de moviment.
Procés de filtratge de maquinari
Si afegiu condensadors de filtre a la línia d’alimentació de MPU-6050, pot reduir l’impacte del soroll d’alimentació al sensor.Mentrestant, durant la disposició del PCB, hauríem d’intentar mantenir la MPU-6050 allunyada de les fonts d’interferències potencials, com ara línies de senyal d’alta freqüència i components d’alta potència.
Processament de filtratge de programari
Després de recopilar les dades en brut de MPU-6050, podem afegir un enllaç de filtratge de programari per processar les dades inicials per eliminar la interferència induïda pel soroll.Els mètodes de filtratge de programari utilitzats habitualment inclouen el filtratge mitjà, el filtratge mitjà, el filtratge de Kalman, etc.
Utilitzeu un filtre intern de pas baix
MPU-6050 té un filtre de pas baix digital integrat intern, que es pot utilitzar per reduir el soroll d’alta freqüència mitjançant la configuració de la seva freqüència de tall.Concretament, podem definir la freqüència de tall del filtre digital modificant el registre de configuració del MPU-6050 per eliminar el soroll d’alta freqüència causat pel mostreig A/D.
Càlcul de trajectòria de moviment basat en MPU-6050
La MPU-6050 és un acceleròmetre de sis eixos i un sensor de giroscopi que es pot utilitzar per mesurar el moviment i l’actitud dels objectes.El càlcul de la trajectòria de moviment basat en MPU-6050 es pot realitzar amb els passos següents:
El primer pas és llegir les dades del sensor.Hem de llegir les dades de l’acceleròmetre i el giroscopi dels sensors MPU-6050 mitjançant els controladors i les funcions de biblioteca adequades.Aquestes dades normalment es produeixen en format digital, de manera que es requereix un treball de conversió i calibració per convertir -les en mesures reals en unitats físiques.
El segon pas és calcular l’acceleració.Primer, hem de processar les dades de l’acceleròmetre per obtenir l’acceleració de l’objecte a cada eix.Posteriorment, per calcular la velocitat i el desplaçament de l’objecte a cada eix, hem d’integrar les dades d’acceleració.Les tècniques d’integració numèrica, com el mètode d’Euler o el mètode Lunger-Kutta, s’utilitzen sovint en aquest procés per assegurar la precisió dels càlculs de desplaçament.
El tercer pas és calcular la velocitat angular.Utilitzant dades del giroscopi, es pot calcular la velocitat angular de l'objecte a cada eix.Un cop més, aquestes dades han de ser calibrades i convertides per obtenir la velocitat angular en unitats físiques reals.
El quart pas és calcular la rotació.Integrant les dades de velocitat angular, es pot calcular l’angle de rotació de l’objecte a cada eix.Això es pot fer mitjançant tècniques d’integració numèrica com el mètode d’Euler o el mètode Longe-Kutta per calcular l’angle.
El cinquè pas és combinar les dades.Combinem les dades d’acceleròmetres i giroscopis per obtenir informació d’actitud i posició completa de l’objecte.Això es pot fer mitjançant algoritmes com el solucionador d'actitud basat en Quaternion o el solucionador d'angles d'Euler.
El sisè pas és visualitzar els resultats.Convertim la trajectòria del moviment d'objectes computada en un conjunt de punts en un sistema de coordenades 3D i la mostrem mitjançant eines de visualització adequades per a una comprensió més intuïtiva de la trajectòria de moviment i l'actitud de l'objecte.
Preguntes més freqüents [FAQ]
1. Quina precisió té MPU6050?
Els resultats adquirits van mostrar una precisió suficient inferior a l’1 % i la fiabilitat, assegurant el dimensionament adequat de l’eix de l’ascensor i els alts estàndards de la indústria de l’ascensor.
2. Com llegir dades de MPU6050?
Per llegir els registres interns MPU6050, el mestre envia una condició d’inici, seguida de l’adreça d’esclaus I2C i un bit d’escriptura i, a continuació, l’adreça del registre que es llegirà.
3. On s’utilitza MPU6050?
En dispositius de seguiment de la salut que es poden portar, de seguiment de fitness.En drons i quadropters, MPU6050 s'utilitza per al control de posició.S'utilitza en el control del braç robòtic.Dispositius de control de gestos de mà.
4. MPU6050 és una IMU?
El bloc de sensors IMU MPU6050 llegeix dades del sensor MPU-6050 que està connectat al maquinari.El bloc produeix acceleració, velocitat angular i temperatura al llarg dels eixos del sensor.
5. Quin és el processament de MPU6050?
Aquest és el processador a bord de MPU6050 que combina les dades procedents de l’acceleròmetre i el giroscopi.El DMP és la clau per utilitzar el MPU6050 i s’explica amb detall més endavant.Com en tots els microprocessadors, el DMP necessita firmware per executar -se.
Prova de funció.Els productes més rendibles i el millor servei són el nostre compromís etern.
Article calent
- Són intercanviables CR2032 i CR2016
- MOSFET: definició, principi de treball i selecció
- Instal·lació i proves de relé, Interpretació de diagrames de cablejat de relé
- CR2016 vs. CR2032 Quina és la diferència
- NPN vs. PNP: Quina diferència hi ha?
- ESP32 vs STM32: quin microcontrolador és millor per a vosaltres?
- LM358 Amplificador operatiu Dual Guia completa: pinyes, esquemes de circuit, equivalents, exemples útils
- Guia de comparació CR2032 vs DL2032 vs CR2025
- Comprendre les diferències ESP32 i ESP32-S3 Anàlisi tècnica i de rendiment
- Anàlisi detallada del circuit de la sèrie RC
 Explorant les capacitats i les aplicacions del xip de comunicació NRF24L01
Explorant les capacitats i les aplicacions del xip de comunicació NRF24L01
2024-04-25
 MMBT3904 NPN Transistor: les seves especificacions, Guia completa d'aplicacions i MMBT3904 vs. MMBT5551
MMBT3904 NPN Transistor: les seves especificacions, Guia completa d'aplicacions i MMBT3904 vs. MMBT5551
2024-04-25
Número de part calenta
 CC0402KRX7R8BB103
CC0402KRX7R8BB103 C0402X5R0G104M020BC
C0402X5R0G104M020BC CGA4J3X5R1V475M125AB
CGA4J3X5R1V475M125AB CL03B152KP3NNNC
CL03B152KP3NNNC CC0805JRNPO0BN120
CC0805JRNPO0BN120 04023A6R0CAT2A
04023A6R0CAT2A 12061A151KAT2A
12061A151KAT2A GRM21BC81E335KA73L
GRM21BC81E335KA73L 0805ZG335ZAT4A
0805ZG335ZAT4A 12101U180FAT2A
12101U180FAT2A
- T495X475K050AH4095
- TPSD336K025R0100
- TAP104M035SPA
- TAP226K035BRW
- EP1K50QC208-3
- MCIMX515CJM6C
- TNY268PN
- AP2281-3WG-7
- ISL83085EIUZ-T
- VE-J30-EZ
- V300A12C500A2
- T491D475M050AT24787622
- TS486-1IST
- MB90F549GSPFV-GE1
- UC3842AN
- TS27L4ACD
- AD80236BBCZ
- AS7C34096-20TC
- CMSH3-100MFL
- LA72910V-TLM-E
- MN101C427MN
- R5F2M122ADSP
- SAB82257-N
- SPM69230
- STI5105ALB
- STLVD111
- STV6434S
- TC58DVM72A1TG00BBH
- TC58DVM72A1XBJ1
- XRT73L02MIV
- AT49BV320B
- B056HV50
- CY2890-F02
- MC44251FN
- MHM2045-001
- UPA1918TE-T1-AT
- TUSB2046BVFR.
- PS8522BTQFN32GTR-A0
- UT69151XTE5-GCA